
La présentation au IIème forum du Conseil du Drone Civil des caractéristiques du futur système de signalement électronique a suscité de nombreuses interrogations dans la communauté. La question est désormais posée, s’agit il d’un système potentiellement dangereux pour nos aéromodèles ?
Francois Cahour, membre fondateur de Finesse Plus, animateur du site www.voltige-planeur-rc.net, par son immense expérience et ses innombrables articles, est une référence en matière de vol en montagne. En tant que professionnel de l’électronique, François dispose de la compétence technique pour analyser les caractéristiques du projet de dispositif de signalement électronique et vous propose son analyse :
« La communication sur le signalement électronique publiée sur le site hélicomicro.com, mérite quelques éclaircissements :
Les arguments sont destinés à rassurer sur l’innocuité du « transpondeur » vis-à-vis de nos ensembles de radio commande. Le terme de transpondeur est certes inadapté, mais utilisé ici par simplification lexicale. Il s’agirait en fait d’une balise émettant toutes le 3 secondes un message d’identification et de positionnement du drone, sans possibilité d’interrogation à distance.

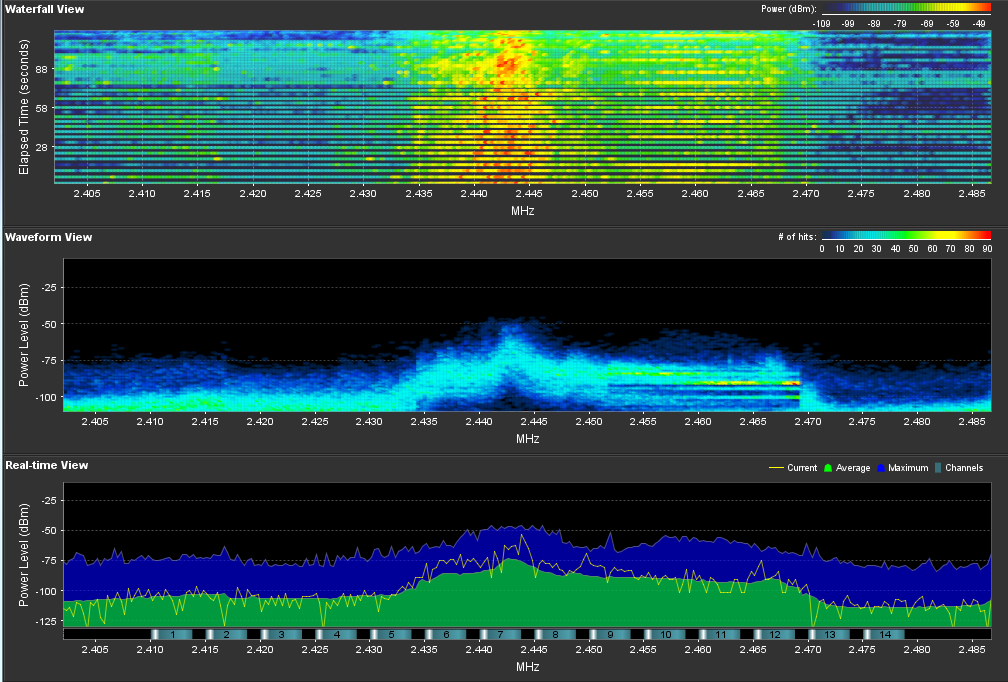
L’image du spectre illustrant le propos est une image théorique et non pas une image réelle issue d’un analyseur de spectre. Pour la lire il faut voir en axe Y (vertical) l’expression de la puissance rayonnée. En X (horizontal) on voit la largeur de bande occupée par chacun des canaux (exprimée en fréquence sur un appareil de mesure). L’amplitude (énergie) du signal est exprimée en dBm, unité logarithmique, qui exprime un rapport de puissance. Ceci est nécessaire à cause précisément des ordres de grandeur physique qu’il ne serait pas possible de visualiser correctement sur une image ou un écran d’appareil de mesure.
Les systèmes Wi-Fi sont décrits de façon abordable ici :
https://fr.wikipedia.org/wiki/Wi-Fi#Les_diff%C3%A9rentes_normes_Wi-Fi
La liste des canaux Wi-Fi, est visible ici :
https://fr.wikipedia.org/wiki/Liste_des_canaux_Wi-Fi
C’est la même représentation théorique que précédemment, donc avec ses limites sur le plan pratique.
Le rôle de n’importe quel récepteur d’onde radio est de séparer le signal utile du bruit radiofréquence capté par l’antenne. Différents dispositifs sont employés comme le partage des fréquences porteuses du signal (séparés par filtrages divers) les types de modulation (démodulateurs spécifiques) les formules de codage analogiques ou numérique (langages).
Tout ceci est naturellement mis en œuvre selon les normes parfaitement décrites et lisibles sur les documents spécialisés.
C’est aussi le cas pour nos systèmes de radiocommande. Mais il n’a pas été prévu de relation technique maitrisée entre les systèmes Wi-Fi utilisés partout dans le monde et nos systèmes de radiocommande utilisant la bande 2.4GHz. Même si la plupart des systèmes RC actuels utilisent certains des protocoles du Wi-Fi.
Les systèmes cohabitent et c’est tout. Les sauts de fréquence de nos systèmes RC et la faible puissance des système Wi-Fi perçus par nos récepteurs en usage courant suffit dans la plupart des cas à éviter un brouillage mutuel.
Ceci jusqu’à un certain point :
Pour avoir utilisé un système RC en 2.4GHz à proximité de fours industriels à micro-onde mal blindés (donc rayonnant du 2.4GHz) le récepteur fut brouillé et le modèle volant mis par terre. Le binding avait pourtant été parfaitement réalisé sur place et le système contrôlé en vol ailleurs à plusieurs reprises sans problème malgré la transmission vidéo en 5.8GHz elle aussi parfaitement règlementaire.
Le modèle vole toujours et la radiocommande fonctionne parfaitement par ailleurs.
En cas d’émission de puissance conséquente (probablement de l’ordre de 10 à 20 dBm pour assurer une écoute à plus de 500m selon la qualité du récepteur de surveillance) à proximité immédiate du récepteur RC (quelques dizaines de cm tout au plus) le spectre HF vu par le récepteur RC pourrait conduire à un blocage ou à des sauts de fréquence continus compromettant la liaison RC et donc compromettant le contrôle du modèle.
Rappelons que la forme du spectre d’une onde modulée par un signal numérique est une forme en courbe de Gauss très large à sa base et ceci quel que soit le type de modulation. Ce dont ne rend pas compte l’image du spectre ci-dessus.
La puissance d’émission même intermittente du transpondeur, pourrait parfaitement bloquer le récepteur qui n’assurera plus sa fonction de commande du modèle. Le seul moyen d’éviter à coup sûr que les émissions du transpondeur n’interfèrent sur le récepteur, est de synchroniser les deux appareils. Chacun doit alors travailler alternativement. Le transpondeur devra n’émettre que quand le récepteur ne reçoit rien, donc quand il émet éventuellement lui-même des données de vol par exemple ou qu’il vérifie le codage issu de l’émetteur.
Il y a peut-être là des pistes de recherche d’application ?
Les systèmes de commande des drones évoqués peuvent différer sensiblement des systèmes RC déjà acquis par les pilotes d’aéromodèles. Peut-être nous faudra-t-il revenir au 41 ou au 72MHz avec leur modulation FM de position ?
L’argument qui indique que le transpondeur n’émettra que toutes les 3 secondes ou tous les 30m en cas de déplacement selon un protocole différent et sur une fréquence différente de celle de travail de la RC, n’est pas suffisant.
Selon les textes en projet : Wi-Fi 802.11N, informations transmises en clair :
- « Le numéro d’identification du dispositif de signalement »
- « La position géographique et l’altitude »
- « La date et l’heure de la position »
- « Les coordonnées de la position du point de décollage de l’appareil »
- « La route et la vitesse de l’appareil »
Ceci suppose l’utilisation d’un GPS embarqué et d’un système de traitement de ces données avant leur transmission. Quel en sera le coût ?
Toutefois, si le 802.11N autorise la transmission sur le 2.4 GHz et le 5.8 GHZ, le 5.8 GHz est déjà écarté par manque de portée selon les termes de la conférence citée ici.
Il est précisé dans la communication citée en référence, que le message délivré toutes les 3 secondes, ne dure qu’une milliseconde, sur l’un des 10 canaux disponibles en dehors du canal RC choisi lors du binding (appairage Rx/Tx). Mais la puissance de l’émetteur utilisé doit être suffisante pour assurer une communication fiable avec le récepteur de surveillance. Dans l’état actuel de sensibilité des modules récepteurs, 20dBm (100mW) à l’émission sont nécessaires. Sans tenir compte des pertes liées aux rayonnements des antennes et à l’environnement magnétique.
L’absence d’émission rayonnée par l’antenne du transpondeur signifie-t-il que le transpondeur lui-même ne rayonne pas, ni par son boîtier ni par ses fils d’alimentation nécessairement communs avec celui du récepteur ? En l’absence de mesures sérieuses par du personnel compétent rien ne permet d’affirmer l’innocuité du dispositif et d’assurer une parfaite compatibilité entre les deux systèmes de communication situés à proximité immédiate l’un de l’autre. On reste là dans des hypothèses qui se veulent rassurantes…
Les vols simultanés de drones opérant en Wi-Fi n’est pas non plus suffisant. Les conditions physiques étant radicalement différentes au regard de la simple proximité. Les conditions d’atténuation des ondes radio en espace libre sont suffisamment connues pour justifier ces précautions.
Il serait paradoxal pour ne pas dire plus, qu’un système à la vocation principale de sécurité provoque lui-même des accidents qui peuvent se révéler gravissimes. Qui sera alors en mesure d’évaluer les responsabilités pour réparation des dommages ?
N’oublions pas par exemple que la transmission d’image vidéo depuis le modèle doit se faire sur une autre bande de fréquence que celle de la télécommande. 5.8GHz pour la vidéo et 2.4GHz pour la RC.
Pourtant les protocoles de communication sont fondamentalement différents.
Il faut savoir aussi que quel que soit le type de modulation de la porteuse ou de la sous-poreuse, les signaux à fronts raides comme les signaux numériques, élargissent le spectre de la porteuse de façon considérable. Ce qui peut annuler l’effet d’atténuation de séparation des canaux, définis eux-mêmes par la fréquence centrale de l’onde porteuse non modulée. Leur largeur finale étant tributaire du type de modulation.
Pour creuser encore un peu sur un exemple parmi d’autres.
https://fr.wikipedia.org/wiki/Modulation_d%27amplitude_en_quadrature
Merci de votre patiente lecture et de vos éventuelles remarques argumentées. »
François Cahour
https://voltige-planeur-rc.net




10 commentaires
Bonjour,
A ce jour ( 23 aout 2019) le dispositif électronique existe-t-il ?
Quelles nouvelles à son sujet ?
A ce jour nous n’avons rien vu qui répondrait au cahier des charges de l’etat. Il y a un an, un grand constructeur de drones nous indiquait qu’il était possible, pour lui, d’intégrer en usine, sur les nouvelles fabrications, un dispositif pouvant répondre aux attentes des autorités.
Bref rien de concret. On imagine bien que si un marché significatif apparaissait, certains industriels se font fort de développer un produit. Mais ce marché c’est l’Europe pas un dispositif destiné au seul marché Français. L’Europe dans le cadre du U-space évoque bien une balise mais ses caractéristiques semblent très différentes des exigences nationales.
Dans tous les cas, ce ne sera pas 10 euros la bestiole (prix public) quand on connait le prix usine de la seule puce GPS nécessaire.
Rappel des souhaits de l’administration Française :
émission (portée 1km) plusieurs fois par minute si on veut une info utile dans la cas ou l’aéronef se déplacerait a grande vitesse…
-des coordonnées gps du point de décollage
-du n° identifiant l’aéronef (celui de la déclaration sur alpha tango..)
-vitesse, altitude, direction
age du capitaine ?
Merci pour cette réponse.
Je ne sais vraiment pas quoi faire. Je débute et du coup hésite à passer les 800 grammes.
Attendre ?
si vous évoluez sur un terrain déclaré a l’information aéronautique (AIP) vous n’avez pas besoin de cette balise, c’est ce que je pensais avant d’apprendre que 37 club affilés a la FFAM et dument déclarés DEVRAIENT avoir ce bidule électronique pour continuer a évoluer sur leur terrain pourtant existant depuis des années… cherchez l’erreur
Et je continue, il peut aussi exister des clubs non déclarés a la dgac (donc pas d’AIP) qui évoluent dans l’espace aérien classe G en dessous de 150m. Ceux là aussi devront pour continuer leur activité équiper tous leurs modèles du « collier électronique » histoire de pister les dangereux terroristes potentiels que nous sommes.
Tout cela va bien sur développer notre activité préférée..
Bonjour,
Désarroi des modélistes : Si un tel dispositif était mis au point et assemblé en un exemplaire , à qui faudrait-il le vendre pour fabrication en série ?
Cordialement
bonjour, ce dispositif franco Francais devrait faire l’objet d’un appel d’offre ou d’une procedure d’homologation par l’etat… Car comment imaginer que n’importe qui mette sur le marché un truc pouvant repondre aux attentes des autorités.. on est dans le brouillard, sachant que le cahier des charges technique detaillé est pas diffusé actuellement.
Merci ,
C’est ce que mon frère m’a dit , qu’il y avait des règles ;un appel d’offre très certainement ; je l’ai incité à bosser dessus à tout hasard ; il excelle en électronique/informatique ( son métier ); il se dit capable de le faire….
il est spécialiste des systèmes embarqués ( informatique linux ) ;
je n’évolue pas dans un club mais poursuis mon apprentissage sur un champ ( 300m x 400m …) mis à ma disposition en zone 50m.
Voilà, c’est fait, le dispositif est obligatoire depuis le 01/07… Une balise est-elle donc disponible ? Avec quels effets sur la RC ? A quel prix ? Dans la négative, toute activité de VDP sur site non déclaré est-elle interdite ?
Bonjour,
Il existe deux problèmes sur les balises que j’ai pu voir à ce jour.
Certaine d’entre elle, émettent des trames wifi en plus de celle strictement utile qui sont dans le texte réglementaire, quelquefois en grande quantité, plusieurs dizaine par seconde.
Plus sournois, lors de l’émission de la trame wifi, la plupart des balises ont un pic de consommation de plus 400mA durant quelques centaines de microsecondes.
Ce phénomène pourrait créer de graves perturbations en cas de batterie faible, peu performante ou dans l’utilisation de BEC de mauvaise qualité.
Les interrogations sur le brouillage possible des RC restent de mise en l’absence d’homologation officielle suivant un appel d’offre lui-même certifié.
Mais les différentes balises que j’ai eu entre les mains et installées tour à tour sur des modèles supports de tests n’ont pas mis en lumière de brouillage.
J’utilise plusieurs balises Naveol sur des planeurs de voltige évoluant parfois loin de l’émetteur. Toujours pas de brouillage constaté à ce jour.
Je vole principalement en espace libre et en vol thermique de relief. Il semblerait que les trames émises de façon brève soient vues par nos récepteurs comme des parasites qui ne provoquent pas de brouillage perceptible. Donc on se met en règle et on oublie. Ce qui compte c’est de piloter.
Un peu hors sujet mais pas inutile:
L’été 2022, j’ai mis par-terre 2 planeurs dont un 2 fois le même jour sur un problème de reset du récepteur. J’ai comme d’habitude refait des essais au sol après récupération du matériel. Le reset des deux récepteurs différents a été provoqué par une baisse de tension momentanée due à un très fort appel de courant provoqué par les servos numériques HV à chaque fois sollicités sur un tonneau déclenché pour un planeur et par des corrections brutales d’un récepteur pourvu de régulateur de trajectoire, un jour de tempête lors de l’approche pour se poser. Les réceptions étaient alimentées par un système BEC à découpage pas assez généreux en courant. L’incident a été parfaitement reproduit au sol. L’ amélioration du système consiste à ajouter des condensateurs électrochimique de forte capacité en sortie du BEC. Ces condensateurs sont absents des productions classiques probablement pour des raisons commerciales: ces condensateurs augmentent le volume des modules, ce qui ne fait pas vendre. Cherchez l’erreur…
Les servos et les récepteurs fonctionnent depuis des années parfaitement et sans brouillage ou perte de portée perceptible. Le système de régulation de trajectoire, utilisé pour les posés en pente dans des condition extrêmes sont les Wingstabi 9 et 12 voies de Multiplex, qui fonctionnent parfaitement.
L’émetteur après la profit Tx est l’émetteur TX Core. Je tiens à préciser que je suis totalement libre de mes propos et n’agit pas en temps qu’influenceur.
Le jour du crash par vent très fort, des modélistes visiblement expérimentés m’ont demandé après avoir pourtant assisté au crash de tester un de leur modèle. Ceci sans aucun dommage! Ils avaient aussi vu la séance de voltige précédent le crash. L’axe moteur fut tordu, mais les ailes volent toujours!